Devised a project from scratch to achieve touchless elevator control like behaviour to ensure safety during the pandemic
Raspberry Pi
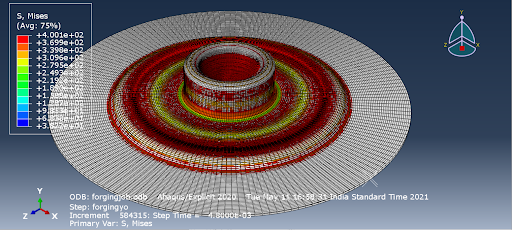
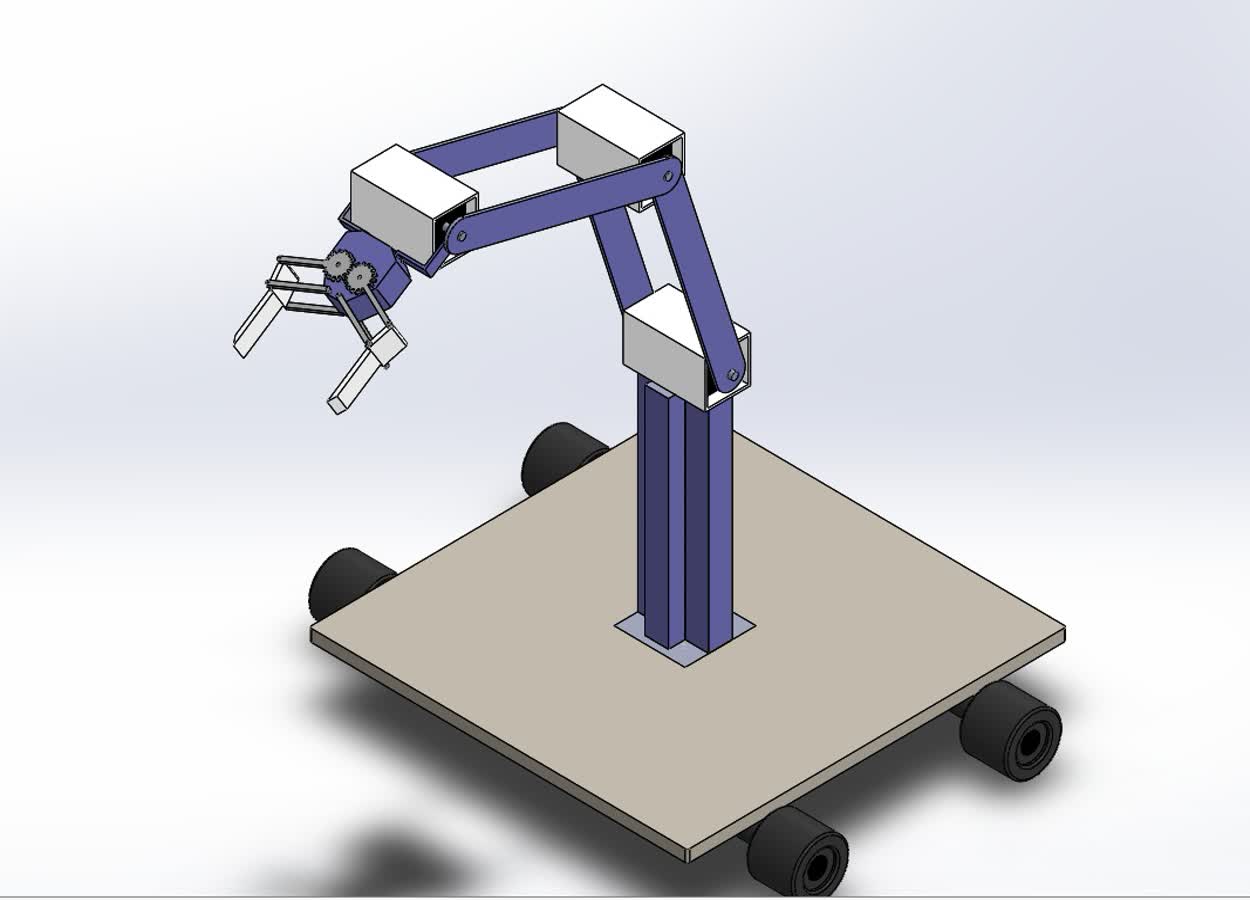
Worked in a team of 5 on an autonomous robotic arm capable of picking and transporting items in a warehouse
ROSGazeboMoveItSolidWorksEAGLE
Worked in team of 3 to estimate trajectories on sequences from the given dataset recorded with handheld device
Sensor CaliberationORB-SLAM3
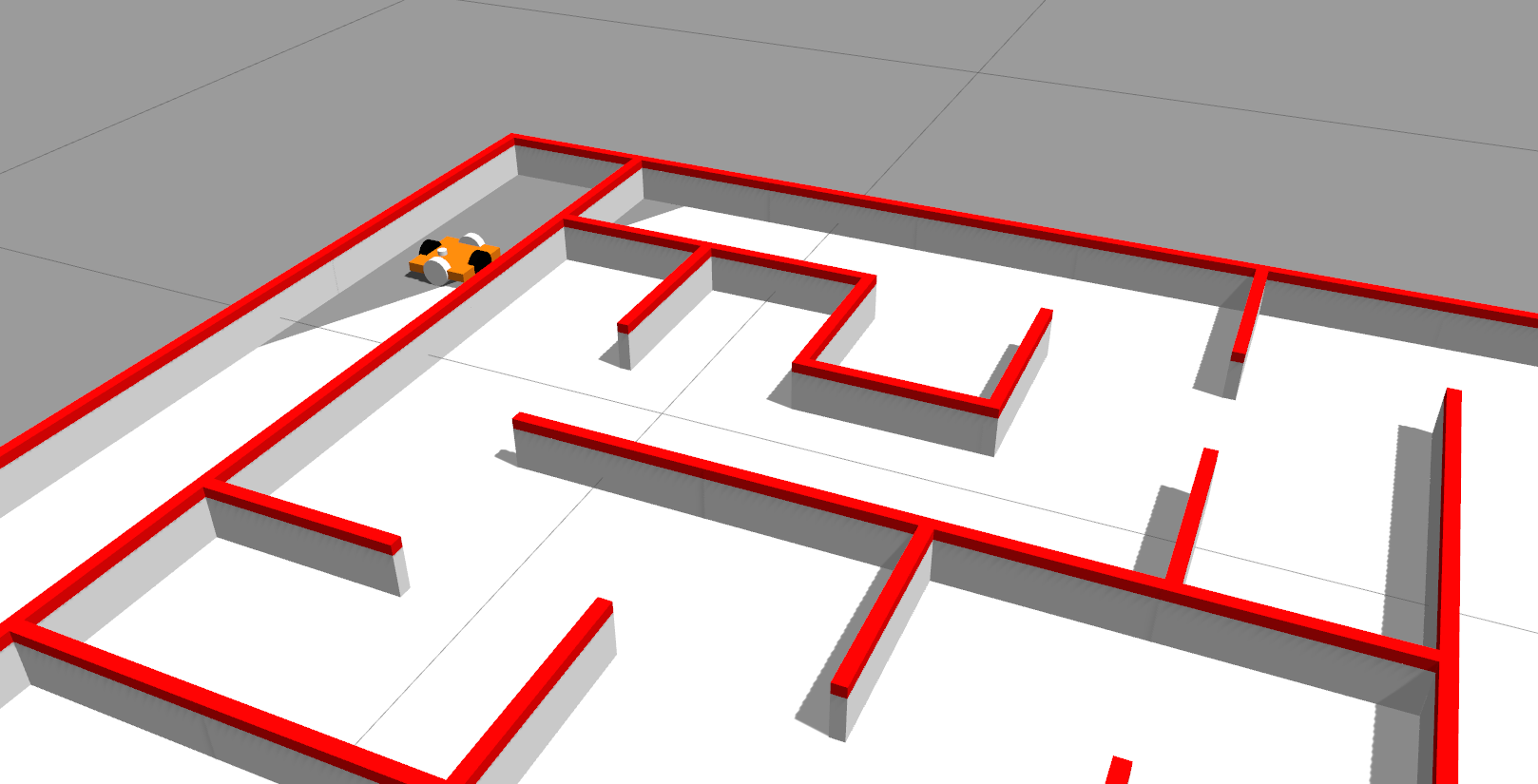
Simulated an autonomous bot using ROS & Gazebo to solve an unknown maze in the shortest time
ROSGazebo
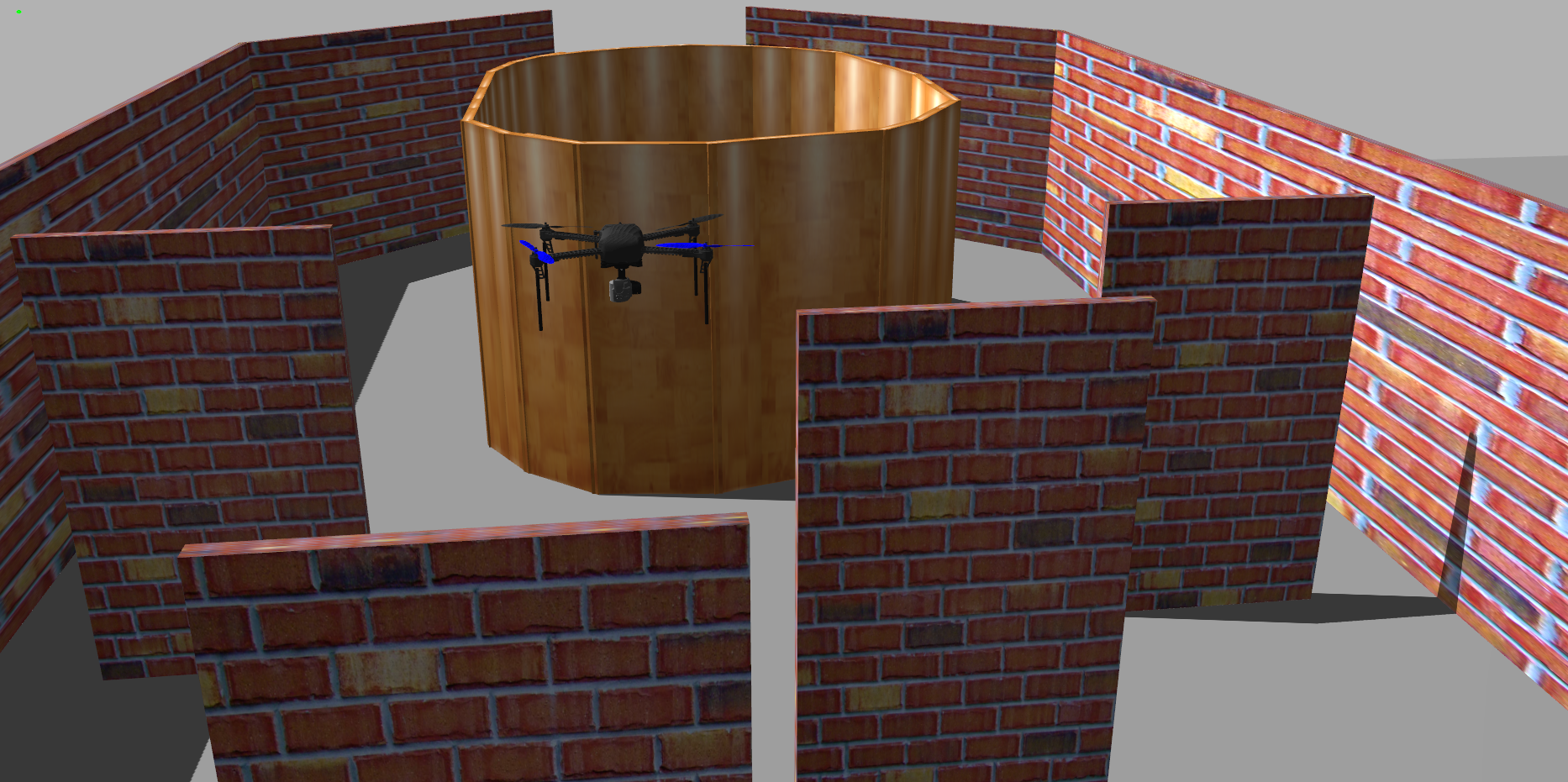
Worked in a team of 8 to autonomously explore static cluttered environments & land on target after detection
ROSGazeboArduPilot
Developed an assistive document reader, dictator and Wikipedia search platform to aid visually impaired
OpenCVTesseractgTTS
Digitized institute mess to replace mess cards with student ID Cards reducing the workload of mess workers
Raspberry PiESP32MQTT protocol
Working in a 20+ member team aiming to develop a self-driving car capable of transversing on Indian roads
Decision Making Subsystem
My Research project under Prof.Arpita Sinha and Prof.Hemendra Arya focusing on improving the performance of Pixhawk Flight Controller Stack(PX4) and centring around applications of quadrotors in precision agriculture.
Sliding Mode Control
Small summer work done under Web & Coding Club (WnCC), IIT Bombay
Tensorflow